NodeMcu Motor Shield. Описание и тестовый Скетч

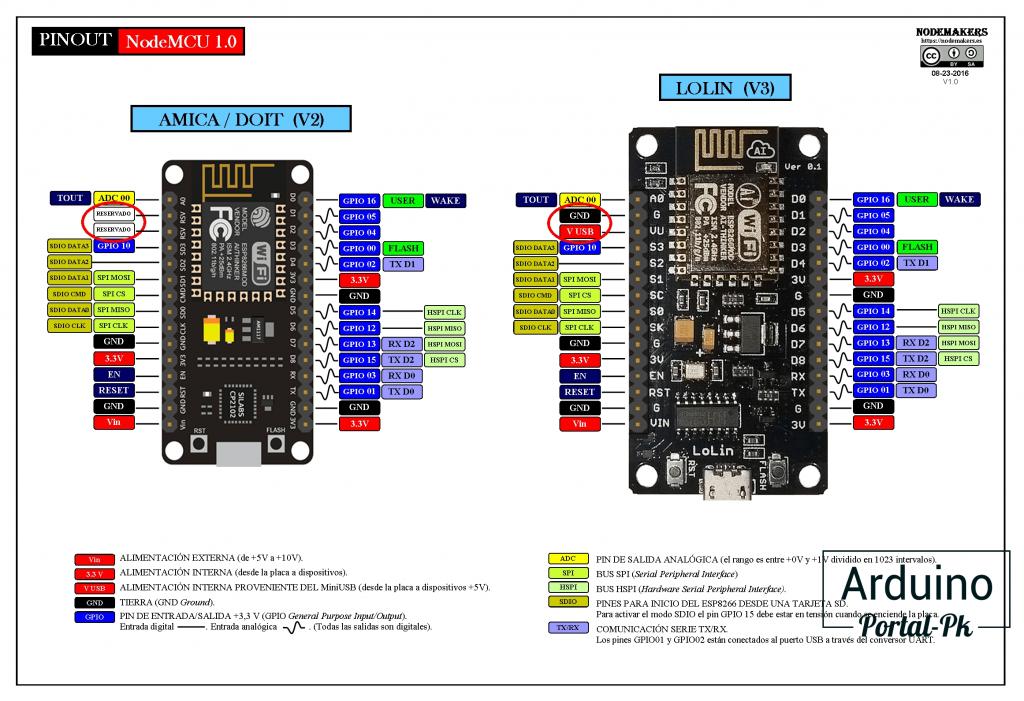
Купил для NodeMcu Motor Shield. При
покупке шилда будьте внимательны он
совместим только с версией
nodemcu amica. На
картинке слева.
 Если вы не
знаете как
прошить NodeMCU читайте: Чтотакое NodeMCU? Программируем в среде ArduinoIDE
Если вы не
знаете как
прошить NodeMCU читайте: Чтотакое NodeMCU? Программируем в среде ArduinoIDE
Motor Shield Состоит из следующих элементов.
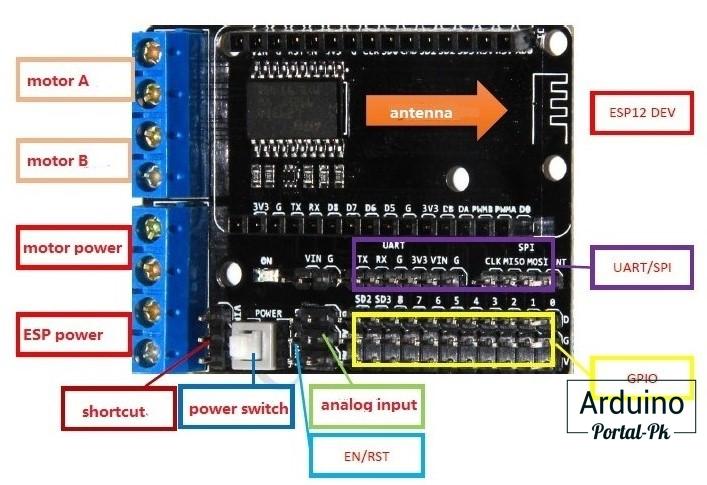
Колодка GPIO рассчитаны для подключения сервоприводов. Данную колодку я использовал в своем проекте на ESP8266: Манипуляторсвоими руками из фанеры
Данная колодка очень удобна и для подключении различной периферии .
Шилд еще оснащен драйвером L293DD. Благодаря чему к Motor Shield можно подключить 2 двигателя постоянного тока с напряжением до 36 В. Для работы драйвера необходимо подать питания на клеммы motor power. Первый двигатель подключается к колодке motor A, второй к motor B.
Распиновка и основные характеристики драйвера L293DD с лева на картинке.
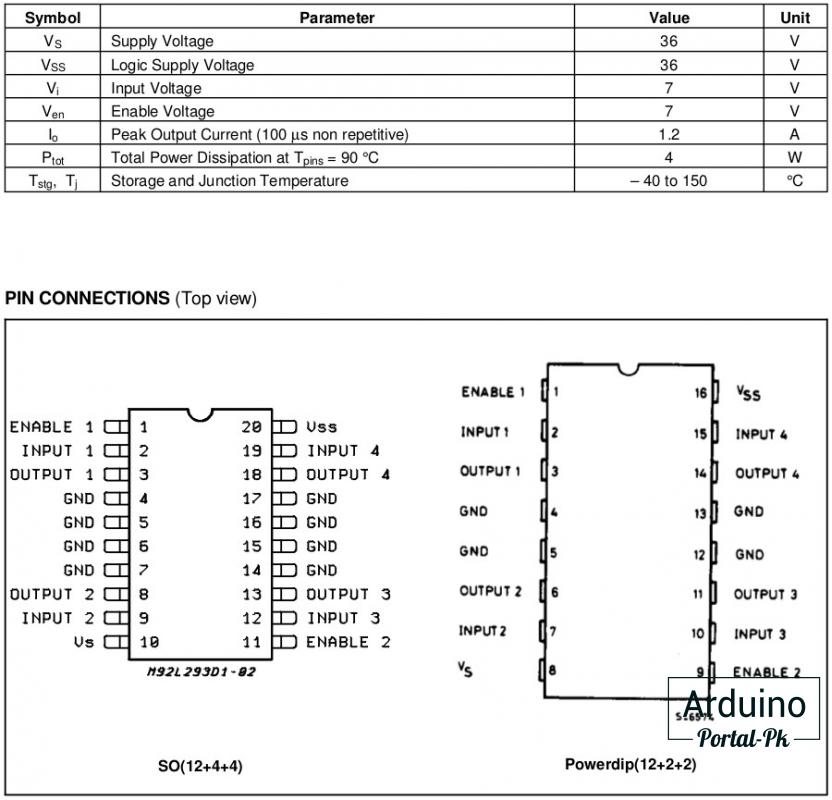
Справа L293D версия с 16 ногами у L293DD 20 ног. Прикладываю Даташит для данных драйверов L293DD.pdf.
Подключаем двигателя и питание к Motor Shield вот по такой схеме.
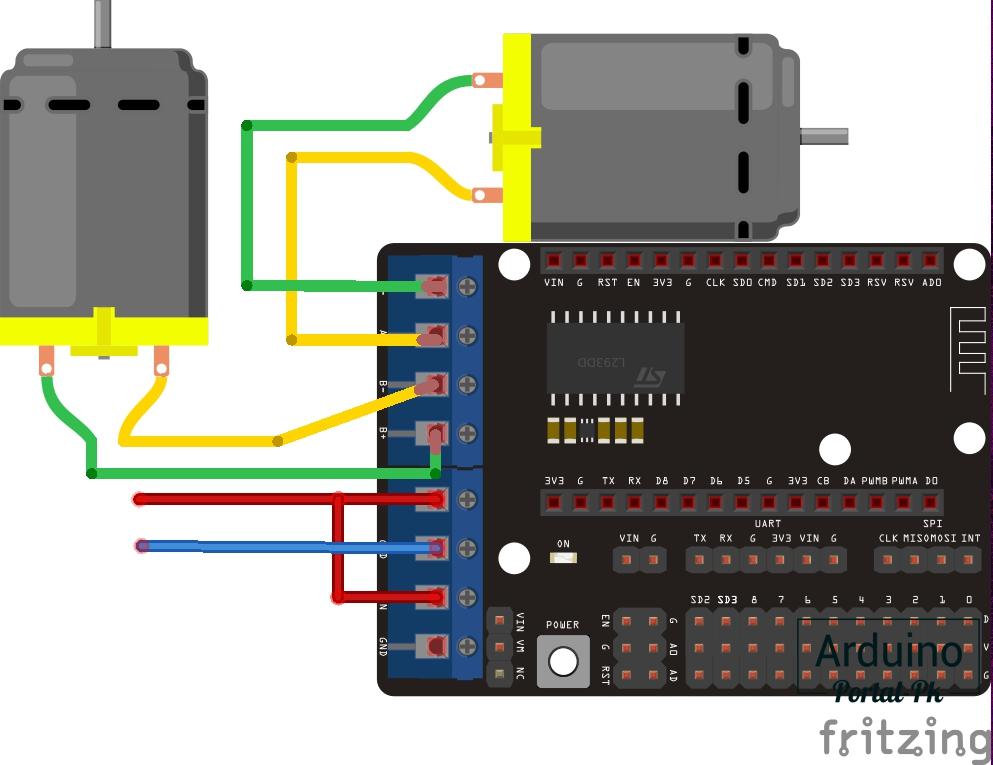
Может кому прегодиться файл Motor
Shield
для Fritzing ESP12E Motor Shield.fzpz
Для проверки работоспособности драйвера можно использовать вот этот скетч.
#define PIN_D1 5 // gpio5 = D1 PWM_A
#define PIN_D2 4 // gpio4 = D2 PWM_B
#define PIN_D3 0 // gpio0 = D3 DA (A- A+) подключается двигатель
#define PIN_D4 2 // gpio2 = D4 DB (B- B+) подключается двигатель
void setup()
{
pinMode(PIN_D1, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D2, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D3, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D4, OUTPUT); // инициализируем Pin как выход
}
void loop()
{
digitalWrite(PIN_D1, HIGH); // PWM_A HIGH
digitalWrite(PIN_D3, HIGH); // DA HIGH
delay(2000); // wait
digitalWrite(PIN_D3, LOW); // DA LOW
delay(2000); // wait
digitalWrite(PIN_D2, HIGH); // PWM_B HIGH, изменяется направление вращения двигателя на контактах (B- B+)
digitalWrite(PIN_D4, HIGH); // DB HIGH
delay(2000); // wait
digitalWrite(PIN_D4, LOW); // DB LOW
delay(2000); // wait
digitalWrite(PIN_D2, LOW); // PWM_B LOW
}Данная программа будет поочередно вращать двигателями . Если у вас по каким то причинам двигателя не вращаются проверьте правильность подключения. Если все правильно то скорее всего у вас бракованный шилд . Это достаточно распространенная ситуация . Пишите продавцу и просите возврат деньги.
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Вернуться в раздел: Обзоры Arduino и электроники Дата публикации 3 апреля , 2018
Читайте также

#5 Гость: anabelle (17 апреля, 2019 в 19:33)
excelente articulo, lo recomiendo. es el mejor.. gracias por hacer esta publicacion
#4 Гость: tarea666 (11 апреля, 2019 в 18:23)
Hola amigo, gracias por esta información. Ayúdame a interesarme en el tema. Mucho éxito en todo lo que haces.

#2 Гость: Niki (27 марта, 2019 в 13:57)
Мне пришел бракованный Motor Shield. Не работает драйвер. Остолбенеть все в порядке.
#1 Гость: Артур Нахалов (26 февраля, 2019 в 12:17)
Огромное спасибо за статью,очень понравилось, а теперь практика,посмотрим,что получится
Cлучайные товары
Набор светодиодов 5mm, 3мм 5 цветов (LED)
PCA9685 — 16-канальный 12-битный PWM/Servo модуль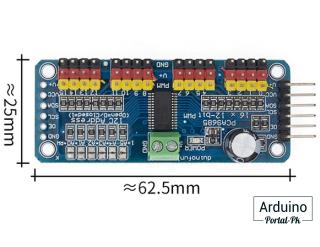

Мы в соц сетях
Комментарии
Войдите или Зарегистрируйтесь И Вы сможете общаться на форуме и оставлять комментарии без капчи.