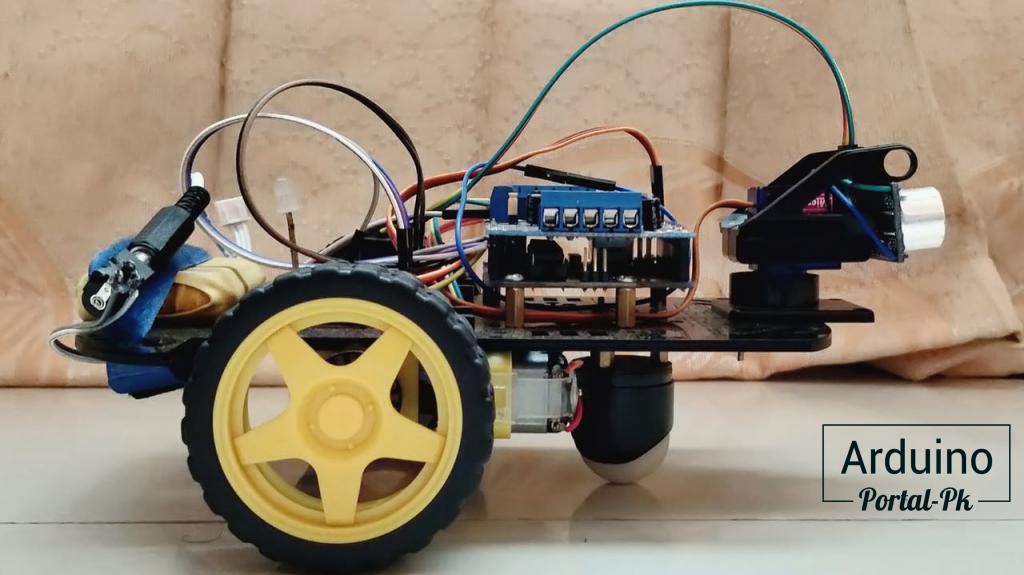
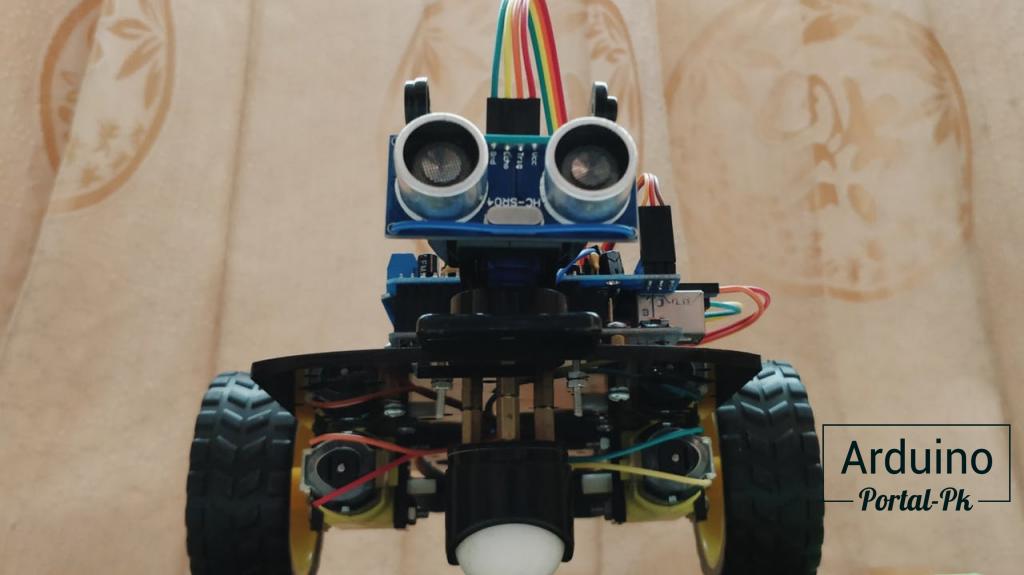
Робот на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04

Устранение препятствий – это одно из существенных центральных проблем при разработке мобильных роботов. В этом документе представлена конструкция умной машины на базе ардуина , которая самостоятельно может определять препятствия и объезжать их , принимая разумные решения. Это роботизированная машинка собирается на мотор шилде (Adafruit Motor Shield), поэтому для ее сборки не нужно ничего паять. Для сервопривода, который вращает сенсор (глаза робота), предусмотрен также вывод.
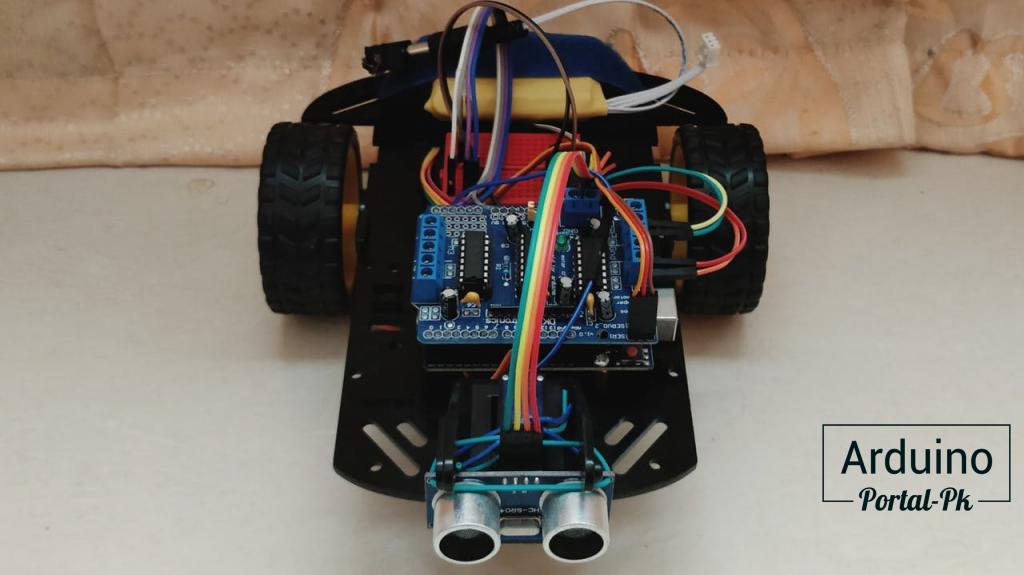
Для обеспечения необходимых автономных функций использовалось программное обеспечение, написанном на языке Arduino. Интеграция ультразвукового датчика расстояния HC-SR04 , установленного на серводвигателе, позволила этому роботу обнаруживать окружающие препятствия.
Будучи полностью автономным, робот способен перемещаться в незнакомой обстановке без каких-либо столкновений. Этот разработанный метод может быть использован для дальнейших улучшений, чтобы повысить адаптивность обнаружения препятствий в различных ситуациях.
Автономный робот - это тот, который имеет какие-то встроенные функции искусственного интеллекта.
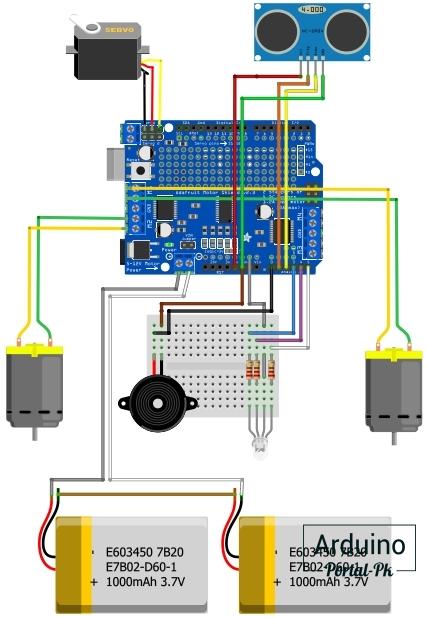
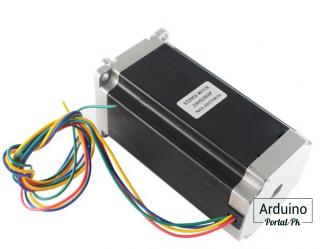
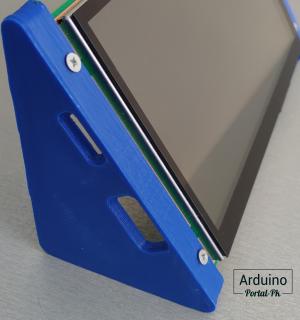
Для создания робота на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04 понадобиться:
Ultrasonic Sensor - HC-SR04 (Generic)
RGB Diffused Common Cathode
Buzzer
Автор рассказывает из каких компонентов сделана робот и предоставляет схему подключения.
Так же необходимо наличие 2 библиотек в среде Arduino IDE:
AFMotor.h Servo.h
Скачать код для машины на на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04.
Более подробная информация на странице проекта.
Таким образом, разработанный робот полностью автономен и способен выполнять свою работу без какого-либо вмешательства человека. После передачи представленного кода этот робот может перемещаться, избегая всех препятствий в неизвестной среде со значительной точностью.
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока. И до встречи в следующем проекте.
Понравилась статья? Поделитесь ею с друзьями:
Вернуться в раздел: Интересные Arduino проекты Дата публикации 23 марта , 2019
Читайте также


#4 Гость: Ирина (8 апреля, 2019 в 09:29)
В общем ничего сложного, если разобраться. Но за обзор спасибо
#3 Гость: Андрей (5 апреля, 2019 в 14:29)
Интересная статья, но мне такого не потянуть. Может когда и соберу такую, благо все расписано довольно подробно
#1 Гость: Tipe (27 марта, 2019 в 20:29)
Типовая машинка на ардуино. Но за обзор спасибо.


Комментарии
Войдите или Зарегистрируйтесь И Вы сможете общаться на форуме и оставлять комментарии без капчи.