Урок 17. Подключаем энкодер к Arduino.

В данном уроке рассмотрим энкодер вращения и подключим его к Arduino.
Модуль KY-040 является энкодером вращения. Из названия понятно, что принцип его работы это вращение. А именно преобразование угла поворота в сигнал. Сигнал может быть цифровым и аналоговым. Более подробную информацию о видах энкодеров и принципе их действия можно почитать в интернете. Цель нашего урока подключить конкретный модуль к Arduino и научиться управлять внешними устройствами с помощью энкодера.
Характеристики Энкодера KY-040:
Функция нажатия: Да
Количество импульсов на 360 гр. : 20
Число рабочих циклов: 30000
Вес: 5 грамм
Модуль инкрементный, т. е. при вращении генерируется импульс, положение определяется путем подсчета импульсов. После включения данного энкодера его положение не известно. Если вам интересно почитайте в интернете, чем отличаются инкрементный энкодер от абсолютного. А для данного урока достаточно того что мы знаем что данный модуль инкрементный.
Для урока понадодиться:
- ARDUINO NANO. Купить можно на AliExpress или в России.
- Модуль поворотного энкодера. Купить можно на AliExpress или в России.
- Провод DuPont. Купить можно на AliExpress или в России.
- Плата макетная беспаечная 55х82х8.5 мм. Купить можно на AliExpress или в России.
- Светодиоды 5mm. Купить можно на AliExpress или в России.
- Резисторы 220 Ом. Купить можно на AliExpress или в России.
Подключаем энкодер KY-040 к Arduino.
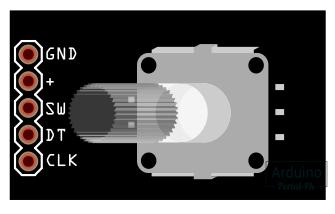
Модуль имеет 5 контактов, это:
- + и GND - линии питания и земли. Данный энкодер является механическим, питание для него не требуется, линии нужны для цепи с подтягивающими резисторами.
- SW - вывод кнопки имеет потягивающий резистор, существует модули у которых при нажатии вывод замыкается на землю;
- CLK и DT - выводы энкодера, они подтянуты к линии питания резисторами 10кОм;
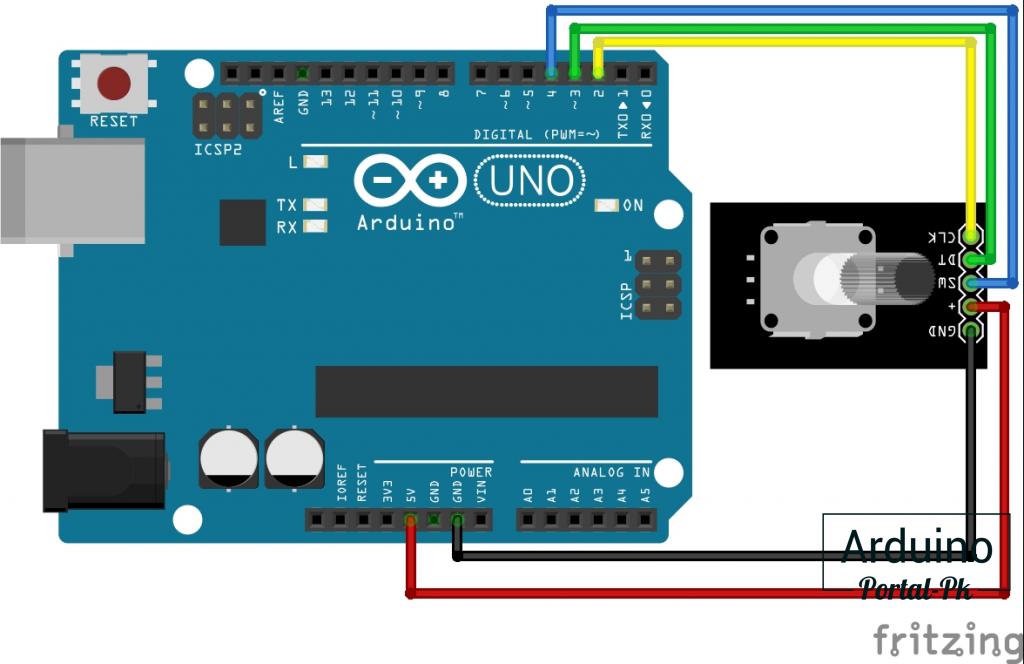
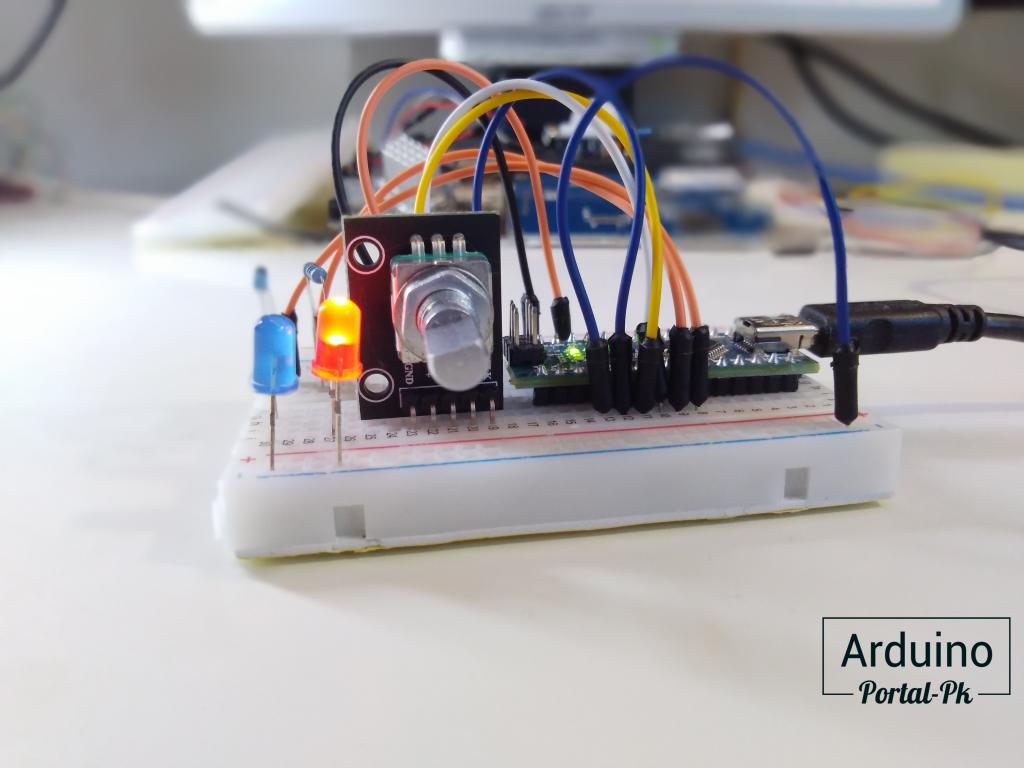
Подключаем Энкодер KY-040 к Arduino UNO по схеме.
Пример кода вывода информации о положении энкодера в монитор порта.
Можно использовать прерывания для работы с энкодером. Но для этого нужен четкий сигнал, так как наш энкодер механический, то будет дребезг контактов. Поэтому будем опрашивать выводы энкодера в теле программы и бороться с дребезгом программно.
#define pin_CLK 2
#define pin_DT 4
#define pin_Btn 3
unsigned long CurrentTime, LastTime;
enum eEncoderState {eNone, eLeft, eRight, eButton};
uint8_t EncoderA, EncoderB, EncoderAPrev;
int16_t counter;
bool ButtonPrev;
eEncoderState GetEncoderState() {
// Считываем состояние энкодера
eEncoderState Result = eNone;
CurrentTime = millis();
if (CurrentTime - LastTime >= 5) {
// Считываем не чаще 1 раза в 5 мс для уменьшения ложных срабатываний
LastTime = CurrentTime;
if (digitalRead(pin_Btn) == LOW ) {
if (ButtonPrev) {
Result = eButton; // Нажата кнопка
ButtonPrev = 0;
}
}
else {
ButtonPrev = 1;
EncoderA = digitalRead(pin_CLK);
EncoderB = digitalRead(pin_DT);
if ((!EncoderA) && (EncoderAPrev)) { // Сигнал A изменился с 1 на 0
if (EncoderB) Result = eRight; // B=1 => энкодер вращается по часовой
else Result = eLeft; // B=0 => энкодер вращается против часовой
}
EncoderAPrev = EncoderA; // запомним текущее состояние
}
}
return Result;
}
void setup() {
pinMode(pin_DT, INPUT);
pinMode(pin_CLK, INPUT);
pinMode(pin_Btn, INPUT); // Кнопка не подтянута к +5 поэтому задействуем внутренний pull-up резистор
Serial.begin(9600);
counter = 0;
}
void loop() {
switch (GetEncoderState()) {
case eNone: return;
case eLeft: { // Энкодер вращается влево
counter--;
break;
}
case eRight: { // Энкодер вращается вправо
counter++;
break;
}
case eButton: { // Нажали кнопку
counter = 0;
break;
}
}
Serial.println(counter);
Для удобства роботы создадим отдельную функцию опроса энкодера. С дребезгом контактов боремся задержкой опроса 1 раз в 5 мс.
Покрутим энкодер по часовой стрелке, после чего увидим в мониторе порта увеличение положительного числа. При нажатии на кнопку у нас сброситься значение в 0. При вращении против часовой стрелки видим отрицательное число.
Если у вас получается противоположное значение, т.е. при вощении против часовой стрелки получаете положительное значение. Исправьте 2 строчки:
EncoderA = digitalRead(pin_CLK);
EncoderB = digitalRead(pin_DT);
На вот такие.
EncoderA = digitalRead(pin_DT);
EncoderB = digitalRead(pin_CLK);
С выводом в монитор порта разобрались. Давайте используем для управления свечением двумя светодиодами.
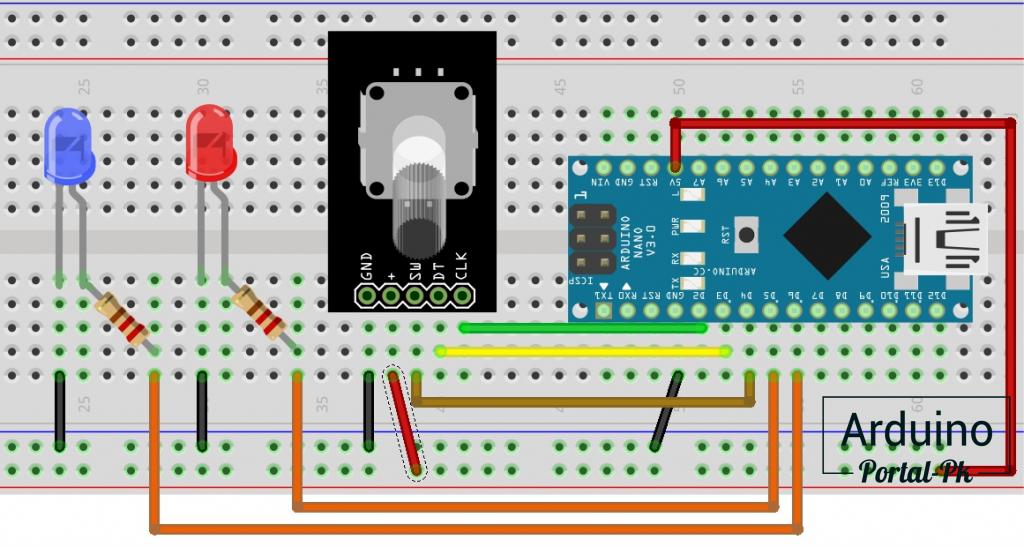
Пример управления яркостью светодиодов с помощью энкодера.
Для примера давайте подключаем к схеме выше еще 2 светодиода. В итоге схема подключения управления яркостью двух светодиодов с помощью энкодера и Arduino NANO будет вот такой.
Добавим необходимые переменные. Для более наглядного примера вынес условие управления светодиодами. При оптимизации кода от этой конструкции можно избавится.
#define pin_CLK 2
#define pin_DT 4
#define pin_Btn 3
#define pin_led1 5 // пин подключения
#define pin_led2 6 // пин подключения
unsigned long CurrentTime, LastTime;
enum eEncoderState {eNone, eLeft, eRight, eButton};
uint8_t EncoderA, EncoderB, EncoderAPrev;
int8_t counter, brightness1, brightness2;
bool ButtonPrev;
eEncoderState GetEncoderState() {
// Считываем состояние энкодера
eEncoderState Result = eNone;
CurrentTime = millis();
if (CurrentTime - LastTime >= 5) {
// Считываем не чаще 1 раза в 5 мс для уменьшения ложных срабатываний
LastTime = CurrentTime;
if (digitalRead(pin_Btn) == LOW ) {
if (ButtonPrev) {
Result = eButton; // Нажата кнопка
ButtonPrev = 0;
}
}
else {
ButtonPrev = 1;
// EncoderA = digitalRead(pin_DT);
// EncoderB = digitalRead(pin_CLK);
EncoderA = digitalRead(pin_CLK);
EncoderB = digitalRead(pin_DT);
if ((!EncoderA) && (EncoderAPrev)) { // Сигнал A изменился с 1 на 0
if (EncoderB) Result = eRight; // B=1 => энкодер вращается по часовой
else Result = eLeft; // B=0 => энкодер вращается против часовой
}
EncoderAPrev = EncoderA; // запомним текущее состояние
}
}
return Result;
}
void setup() {
pinMode(pin_DT, INPUT);
pinMode(pin_CLK, INPUT);
pinMode(pin_Btn, INPUT); // Кнопка подтянута к GND Иначе используем INPUT_PULLUP
Serial.begin(9600);
counter = 0;
}
void loop() {
switch (GetEncoderState()) {
case eNone: return;
case eLeft: { // Энкодер вращается влево
counter--;
break;
}
case eRight: { // Энкодер вращается вправо
counter++;
break;
}
case eButton: { // Нажали кнопку
counter = 0;
break;
}
}
Serial.println(counter);
if (counter < 0)
{
brightness2 = -counter;
brightness1 = 0;
}
else if (counter > 0)
{
brightness1 = counter;
brightness2 = 0;
}
else
brightness1 = 0, brightness2 = 0;
analogWrite(pin_led1, brightness1); // устанавливаем значение
analogWrite(pin_led2, brightness2); // устанавливаем значен
}
Вращение энкодера по часовой стрелке привет к тому, что загорается красный светодиод. При этом яркость плавно нарастает. При вращении против часовой стрелки яркость красного светодиода уменьшается, до того момента пока он не погаснет. Если мы продолжаем вращение против часовой стрелки начнет светиться синий светодиод с плавным увлечением яркости. При нажатии на кнопку энкодера оба светодиода гаснут, не зависимо от того какой светодиод светил.
Энкодер широко используется в проектах на Arduino. Например, для управления работы 3D принтером используется как раз энкодер аналогичный KY-040. При разработке панели управления самодельным ЧПУ станком используется также энкодер. И это только малая доля использования энкодера. Большинство проектов, где используется потенциометр его можно заменить на энкодер. Пишите в комментариях, как вы используете энкодер.
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока.
И до встречи в следующем уроке.
Понравилась статья? Поделитесь ею с друзьями:
Файлы для скачивания
| Вывод в монитор порта.ino | 2 Kb | 942 | Скачать | |
| Управление яркостью светодиодов с помощью энкодера.ino | 3 Kb | 888 | Скачать |
Вернуться в раздел: Уроки Arduino: Подключение датчиков и модулей к Arduino Дата публикации 12 февраля , 2020
Читайте также


Cлучайные товары
5 В. 1, 2, 4, 8 канальный релейный модуль
Raspberry Pi Pico W Starter Kit


Мы в соц сетях
Комментарии
Войдите или Зарегистрируйтесь И Вы сможете общаться на форуме и оставлять комментарии без капчи.